Konsep
dasar akustik
Laut
begitu luas dan dinamis, manusia pernah
mencapai planet terjauh namun manusia belum pernah mencapai laut terdalam. oleh
karena itu manusia membutuhkan alat dan metode untuk mengetahui suatu objek apa
yang ada dikolom perairan.
Secara umum akustik bisa diartikan sebagai ilmu yang membahas tentang gelombang
suara dan perambatannya dalam suatu medium, sehingga akustik kelautan dapat
diartikan sebagai ilmu yang membahas tentang gelombang suara dan penjalarannya
didalam kolom air laut.
Akustik
diklasifikasikan menjadi 2, yaitu akustik aktif dan akustik pasif. Akustik
aktif merupakan gelombang suara yang dipancarkan kemudian diterima kembali dan
dapat diketahui dari sifat-sifat gelombang itu sendiri. Kita dapat mengetahui
jarak dari objek yang dideteksi tersebut
dari hasil pemantulan gelombang suara. Contohnya sonar.

{kind=link}
akustik
pasif yaitu menerima atau mendengarkan gelombang suara yang datang dari objek
yang berada didalam kolom perairan. Akustik pasif dapat digunakan untuk
mendengarkan ledakan bawah air (seismic), gempa bumi, letusan gunung
berapi, suara yang dihasilkan oleh ikan dan hewan lainnya, aktivitas
kapal-kapal ataupun sebagai peralatan untuk mendeteksi kondisi di bawah air
(hidroakustik untuk mendeteksi ikan).
Pada dasarnya pemantauan hidroakustik
didasarkan pada prinsip yang sederhana.
Gelombang suara akustik dipancarkan melalui
sebuah alat yang menghasilkan energi akustik (suara) pada kolom perairan.
Energi dari pulsa suara yang dipancarkan melalui medium air. Ketika energi
tersebut mengenai suatu objek, seperti ikan ataupun dasar perairan, beberapa
energi akan memantul kembali ke transduser (alat pemancar dan penerima
gelombang suara). Nilai hamburan balik yang diterima oleh alat dan
kemudian akan dikirimkan ke perangkat output(seperti grafik
perekam video atau layar) dan digital echo processor.
Dengan menentukan selang waktu antara pulsa
yang dipancarkan dan yang diterima, transducer dapat memperkirakan jarak dan
orientasi dari suatu objek yang dideteksi. (Jarak = kecepatan suara x waktu
/2).
Akustik kelautan merupakan metode yang paling
baik saat ini, oleh karena itu akustik dapat dimanfaatkan oleh berbagai bidang
diantaranya Militer, biologi laut, perkapalan, pemetaan, oseanografi kelautan,
dan industri.
Kecepatan suara
Bunyi memiliki cepat rambat yang terbatas.
seperti halnya cahaya bunyi memerlukan waktu untuk berpindah. Cepat rambat
bunyi jauh lebih kecil dibandingkan dengan cepat rambat cahaya. Karena bunyi
termasuk gelombang, cepat rambat bunyi juga memenuhi persamaan cepat rambat
gelombang. Jika bunyi menempuh jarak (s) selama selang waktu (t) maka akan
memenuhi hubungan
V = s/t
s = jarak tempuh (m)
t
= waktu ( s )
v
= cepat rambat bunyi (m/s)
Satu periode gelombang menempuh jarak sejauh
satu panjang gelombang. Maka jika t = T, maka s = λ . Maka bentuk lain ungkapan
cepat rambat gelombang adalah V=λ/T oleh karena f = 1/T ,maka
V = λf
dengan
λ = panjang gelombang bunyi (m)
T
= periode gelombang bunyi (s)
F
= ferkuensi gelombang bunyi (Hz)
Pada
laut, suara dirambatkan melalui medium air. Kecepatan rambat suara laut berbeda
dengan kecepatan rambat udara ataupun darat. Bunyi merambat di udara dengan
kecepatan 1.224 km/jam. Bunyi merambat lebih lambat jika suhu dan tekanan udara
lebih rendah. Jika dibandingkan dengan cepat rambat udara, di laut kecepatan
rambatnya lebih cepat 4x lipat dibangingkan dengan cepat rambat di udara. Hal
tersebut diakibatkan partikel air laut lebih rapat dibandingkan dengan di udara
yang lebih renggang. Sedangkan di darat (zat padat) lebih cepat lagi cepat
rambat di laut karena benda padat kerapatannya paling tinggi diantara medium
yang lain.
Cepat rambat bunyi pada medium tertentu
|
Medium
|
Cepat
Rambat Suara (m/s)
|
|
Udara (0°C)
|
331
|
|
Udara
(15°C)
|
340
|
|
Air
(25°C)
|
1490
|
|
Air Laut
(25°C)
|
1530
|
|
Tembaga
(20°C)
|
3560
|
|
Besi
(20°C)
|
5130
|
|
Aluminium
(20°C)
|
5100
|
(Sumber:
http://andrynugrohoatmarinescience.wordpress.com)
Secara
sederhana, pola perambatan gelombang suara di dalam laut yang dibagi secara
vertikal adalah sebagai berikut:
a) Zona
1 (mixed layer) : Kecepatan suara cenderung meningkat akibat faktor perubahan
tekanan mendominasi faktor perubahan suhu.
b) Zona 2
(termoklin) : Kecepatan suara menurun dan menjadi zona minimum kecepatan suara
akibat terjadinya perubahan suhu yang sangat drastis dan mendominasi faktor
perubahan tekanan.
c) Zona 3 (deep
layer) : Kecepatan suara meningkat kembali akibat faktor perubahan tekanan
mendominasi kembali faktor perubahan suhu.
Kecepatan suara
dapat dihitung menggunakan rumus :
C = 1449,2 + 4,6T
- 0,055T2 + 0,00029T3 + (1,34 - 0,010T)(S-35) -
0,016Z
dengan : C =
Kecepatan suara (m/s)
T
= Suhu (°C)
S
= Salinitas (psu)
Z
= Kedalaman (m)
Dari persamaan di atas, kecepatan suara
bergantung pada suhu, salinitas, tekanan, musim dan lokasi. Semakin jauh suara
dari sumber suara, maka kegiatan echo akan mengalami perubahan dari segi
ruang dan waktu.
Afternoon effect
Gangguan dari kolom air pernah terjadi pada
suatu penelitian yang dilakukan tahun 1930-1960 oleh Letnan Pryor di Guantanamo
Bay, kasus ini lebih dikenal sebagai afternoon
effect. Letnan Pryor melakukan pengukuran menggunakan echo ranging system (sekarang dikenal sebagai SONAR).
Ketika
dilakukan pengukuran pada pagi hari, pengukurannya berhasil dan memperoleh
data, tetapi ketika dilakukan pada siang hari terutama ketika cuaca panas/terik
data yang diperoleh berubah. Hal ini disebabkan karena pada siang hari,
fitoplankton sedang berkembang, berfotosintesis dan menghasilkan
gelembung-gelembung udara yang dapat menghambat perambatan suara.
Sedangkan pada pagi hari, perairan bersifat
homogenous karena matahari belum memanasi perairan secara optimal seperti yang
terjadi pada siang hari. Dan beberapa tahun kemudian diketahui bahwa penyebab
terjadinya missing sounds adalah
pengaruh dari suhu, salinitas, dan faktor lainnya.
Atenuasi gelombang
suara
Atenuasi
atau pelemahan energi/intensitas suara terjadi karena adanya konversi energi
secara gradual menjadi energi kalor selama perjalanannya. Penghamburan oleh
bermacam partikel yang ada dilaut turut memberikan andil dalam penurunan intensitas
suara, namun dalam percobaan sebenarnya tidak mungkin membedakan efek
penyerapan (konversi) dengan efek penghamburan. Semakin bertambah jarak tempuh
dan semakin tinggi frekuensi gelombang yang digunakan maka absorpsi menjadi
semakin besar (urick, 1983)
Absorpsi
dilaut lebih tinggi daripada di air tawar dan besaran koefisien atenuasi dilaut
terbuka meningkat 20 Hz – 300 kHz. Ketergantungan koefisien atenuasi pada
frekuensi yang sangat komplek menunjukan bahwa pada berbagai kanal frekuensi
yang berbeda terjadi proses yang berbeda-beda pula.

Daerah proses-proses dominan yang menyebabkan
atenuasi (Jensen et al, 1994)
Pada
gambar diatas, menurut Jensen et al ketergantungan atenuasi frekuensi secara
kasar dapat dibagi menjadi empat wilayah.
Daerah
frekuensi kurang dari 20 Hz (daerah I) belum dapat dijelaskan secara pasti
tetapi diduga daerah tersebut berhubungan dengan batas frekuensi rendah kanal
suara dalam dan atenuasi suara pada frekuensi rendah ini sangat kecil. Pada
daerah II (20Hz – 1kHz), mekanisme utamanya adalah relaksasi kimia asam borat
(B(OH)3) yang dipengaruhi oleh sifat kimia lautan seperti suhu, pH,
dan komposisi garam.
Dalam
akustik proses relaksasi merupakan salah satu kondisi setimbang yang
didistribusikan oleh gelombang suara yang lewat dengan fase waktu antar
tekanan dan respon medium. Faktor lain
yang mempengaruhinya antara lain efek transmisi yang menggunakan ledakan,
difraksi pada kanal suara laut dalam, penghamburan dan viskositas.
Frekuensi 5
hingga 100kHz di samudera mengalami atenuasi 30 kali lebih besar daripada air
tawar. Perbedaan ini disebabkan adanya beda fase yang besar antara tekanan dan
respon medium.
Pada wilayah
frekuensi daerah IV atenuasi yang terjadi karena adanya konduksi panas dan
viskositas. Konduksi panas menciptakan suatu kehilangan akibat aliran panas
dari gelombang suara yang tertekan kemudian mengembang dalam air, namun
kontribusinya terhadap total penyerapan sangat kecil (Jensen et al., 1994)
Shadow zone
Shadow Zone adalah suatu wilayah dimana gelombang suara
tidak dapat merambat atau lemah sehingga
hampir tidak dapat merambat dalam suatu medium. Menurut Urick (1983) di kolom
perairan terjadi pembelokan gelombang suara (refraksi) yang terjadi karena
perbedaan kedalaman, salinitas dan suhu ait laut. Pengaruh yang paling nyata
terlihat jika terjadi kenaikan suhu air laut sebesar 1oC akan
menyebabkan meningkatnya kecepatan suara sebesar 1m/detik. Akibatnya jika suhu
meningkat menurut kedalaman maka gelombang suara yang dipancarkan akan
cenderung dibelokan ke arah permukaan air.
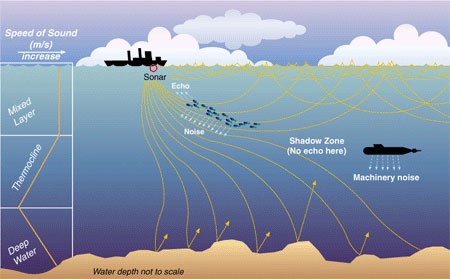
Sumber:
http://www.dosits.org/
Gambar
1. Shadow zone
Sebaliknya jika
suhu menurun karena kedalaman maka gelombang suara akan cenderung dibelokan ke
dasar perairan. Karena terjadi pembelokan gelombang suara ke permukaan dan ke
dasar perairan, maka terdapat wilayah yang tidak terjadi perambatan gelombang
suara yang disebut shadow zone. Jarak dari sumber suara ke shadow
zone ditentukan oleh laju perubahan suhu terhadap kedalaman, kedalaman
sumber suara, dan kedalaman penerima suara.
untuk sebuah
tujuan militer penyusupan kapal selam umumnya bergerak pada posisi "daerah
kedap" transmisi gelombang udara (shadow zone). Daerah ini merupakan
daerah aman dimana suhu dan salinitas laut pada lapisan tersebut memantulkan
rambatan suara yang datang sehingga kapal dapat terhindar dari deteksi SONAR
lawan.
Alat Survey
Akustik
Alat-alat
yang digunakan dalam survey Akustik:
- Multi-bottle Water Sampler with CTD

Multi-bottle Water Sampler dengan CTD
Multi-bottle Water Sampler ini digunakan untuk mengambil samper air pada
beberapa kedalaman tertentu. Alat ini dapat digunakan hingga kedalaman 1000
meter. Rangka yang berwarna putih pada Gambar diatas biasa disebut rossete.
Karena alat ini hanya dapat mengambil sampel saja,
alat ini biasanya digunakan bersamaan dengan
CTD. Selain untuk memperoleh data, CTD juga digunakan untuk mengontrol Water
Sampler. Rencana penurunan telah diprogram melalui laptop atau komputer
dengan software yang telah disediakan.
Bagian atas dan bawah botol dibuka sebelum
diturunkan. Pada saat mencapai kedalaman yang telah diprogram, tutup botol akan
menutup secara otomatis. Kekurangan dari Water Sampler ini mungkin hanya
penggunaan yang harus bersamaan dengan CTD. Selain itu alat ini adalah alat
yang sangat efisien, dapat memperoleh banyak sampel air pada beberapa kedalaman
yang telah diprogram dalam software.
CTD, dari namanya yang merupakan akronim dari Conductivity,
Temperature, and Depth ini merupakan alat yang dapat merekam data pada
kedalaman air laut. Dapat dilihat pada Gambar diatas, CTD diletakkan di bagian
bawah Water Sampler. Data yang dapat direkam yaitu kedalaman, kedalaman
saat pengambilan sampel, suhu, konduktivitas, klorofil, dan turbiditi. CTD ini
dapat digunakan bersamaan dengan Water Sampler. CTD diturunkan bersamaan
dengan Water Sampler dan secara otomatis akan merekam data. Hasil
rekaman dari CTD ini akan keluar berupa data digital di komputer ataupun
laptop. Data yang dihasilkan dari CTD ini didapatkan dengan resolusi tinggi
dengan interval waktu dan kedalaman yang cukup singkat. Data yang dihasilkan
pun aktual dan ilmuan dapat meneliti relasi pada parameter-parameter tersebut.
Kekurangan dari kedua alat ini yaitu biaya yang besar dan juga memakan waktu
cukup lama.
- ADCP
Acoustic Doppler Current Profiler (ADCP atau ADP) adalah current meter
hydroacoustic mirip dengan sonar, digunakan untuk mengukur kecepatan arus
air selama rentang kedalaman dengan menggunakan efek Doppler dari
gelombang suara yang tersebar kembali dari partikel dalam kolom air. Frekuensi
kerja berkisar dari 38 kHz ke beberapa megahertz. ADCP terdiri dari
osilator piezoelektrik untuk mengirim dan menerima sinyal suara.

Gambar ADCP
Prinsip
Kerja:
Perhitungan navigasi, menggunakan kalibrasi
yang dilakukan sekali secara lengkap.Arus absolut yang melampaui kedalaman atau
kedalaman referensi didapatkan dari rata-rata kecepatan relatif kapal. Arus
absolut pada setiap kedalaman dapat dibedakan dari data terakhir dari kapal
navigasi dan perhitungan relatif ADCP. Prinsip Perhitungan Gelombang Oleh ADCP.

Gambar. Prinsip kerja ADCP
Prinsip dasar perhitungan dari perhitungan
arus/gelombang yaitu kecepatan orbit gelombang yang berada dibawah permukaan
dapt diukur dari keakuratan ADCP. ADCP
mempunyai dasar yang menjulang,dan mempunyai sensor tekanan untuk
mengukur pasang surut dan rata-rata kedalaman laut. Time series dari kecepatan,
terakumulasi dan dari time series ini, kecepatan spektral dapat dihitung. Untuk mendapatkan ketinggian diatas permukaan,
kecepatan spektrum dierjemahkan oleh pergeseran permukaan menggunakan
kinematika linear gelombang.
Fungsi ADCP:
ADCP
dapat menghitung secara lengkap, arah frekuensi gelombang spektrum, dan
dapat dioperasikan di daerah dangkal dan perairan dalam. Salah satu keuntungan
ADCP adalah, tidak seperti directional wave buoy, ADCP dapat dioperasikan
dengan resiko yang kecil atau kerusakan. Sebagai tambahan untuk frekuensi
gelombang spektal, ADCP juga dapat digunakan untuk menghitung profil kecepatan
dan juga level air).
Kegunaan ADCP pada berbagai aplikasi :
1.
Perlindungan pesisir dan teknik pantai.
2.
Perancangan pelabuhan dan operasional
3.
Monitoring Lingkungan
4.
Keamanan Perkapalan
Keuntungan ADCP
1.
Definisi yang tinggi dari arah arus/gelombang
pecah.
2.
Logistik yang sederhana dengan bagian bawah
yang menjulang
3.
Kerusakan yang kecil, dan resiko yang kecil.
4.
Kualitas perhitungan permukaan yang tinggi yang
berasal dari dasar laut.
ADP/ADCP keistimewaannya meliputi
•
Dapat bekerja di kapal dengan penentuan posisi
yang lengkap termasuk bottom-tracking dan permukaan laut untuk transek dengan
menggunakan GPS.
•
ADCP memberikan sistem real-time untuk pesisir
pantai, dan monitoring pelabuhan.
•
ADCP mudah digunakan untuk mengukur arus
•
Mempunyai system otomatik yang dilengkapi
dengan baterai dan perekam untuk buoy lepas pantai atau bottom-mounting.
Bagian-Bagian ADCP:
Sistem ADCP terdiri dari ADCP, kabel, baterai,
flash memory card, dan perangkat lunak. Kedua kapasitas baterai dan memori
dapat ditingkatkan dengan di-upgrade untuk penyebaran lebih lama.

Gambar. Bagian ADCP
DAFTAR ACUAN :
Tidak ada komentar:
Posting Komentar